Azipod Thruster
Magnus Gregory – 24/10/24
Motivation:
The Wolfson Unit is constantly developing its experimental offering to keep pace with the state of the art. This has included a recent addition to the propulsion systems we can offer to clients:
Azimuthing podded thrusters allow for full 360 degree control of the thrust output. These drive systems have, therefore, become a popular option on vessels that require very good manoeuvrability or even dynamic positioning (DP). As a result, we have developed a new base platform which we will be using for this kind of testing and can also be purchased for use in other testing institutions.

What we offered:

Key Features:
- Compact leg and gearbox size allows fitting of a number of different thruster cowling designs
- Adjustable vertical immersion to suit cowling design
- Compact size allows propeller diameter sizing over a large range, allowing a choice of model scale which suits the hydrodynamic facility.
- Robust, simple to fit and commission into a model
- Powerful sensored brushless drive motor for accurate control of propeller RPM
- Standard NEMA 23 stepper motor for control of azimuthing angle
- Full 360 degree rotation (single turn in opposed directions)
- Full waterproof sealing at thruster / hull boundary
| Technical Specification | Value |
|---|---|
| Maximum thrust gearbox capacity | 150N |
| Maximum gearbox torque capacity | 5Nm |
| Maximum no load shaft RPM (36V) | 4300 |
| Maximum rated motor power | 2000W |
| Motor supply voltage | 24 – 36V DC |
| Motor sensors | 3 x hall effect |
| System gearbox ratio | 1:1 |
| Suggested propeller diameter range | 80 – 130mm |
| Azimuthing range | 360 degrees |
| Vertical adjustment range from thruster CL and hull bottom | 53 – 173mm |
| Maximum hydrostatic pressure head @ prop centre line | 0.5m |
| Azimuthing motor | NEMA 23 stepper motor (113mm) |
| Maximum azimuthing torque | 3Nm |
| Maximum azimuthing motor current @ max torque | 4.2A |
| System mass | 4.5kg |
ACUA OCEAN
Magnus Gregory – 12/02/24
Background:
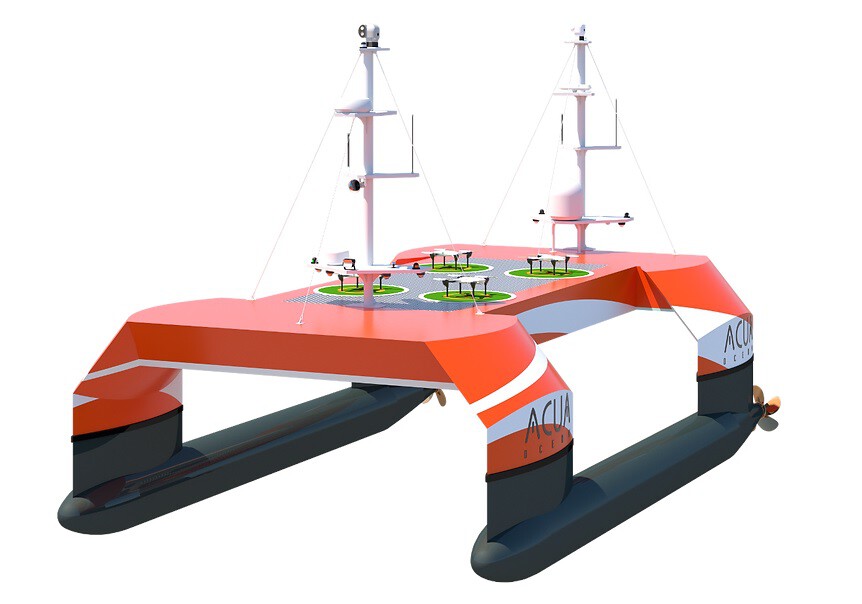
ACUA Ocean are developing zero-emission, autonomous vessels with the capability to deploy and retrieve a remotely operated underwater vehicle (ROV) for use across the maritime sector. We were involved in an Innovate UK competition (a research grant) to help assess the safety and operational windows of their small waterplane area twin hull (SWATH) design. These kinds of hulls offer some benefits to the seakeeping performance when compared with traditional monohulls.
In conjunction with the University of Southamption department for Ship Science we conducted some experiments to evaluate the responses of the vessel to various sea states and to also assess its resistance while towed in calm water and in waves.

What we offered:
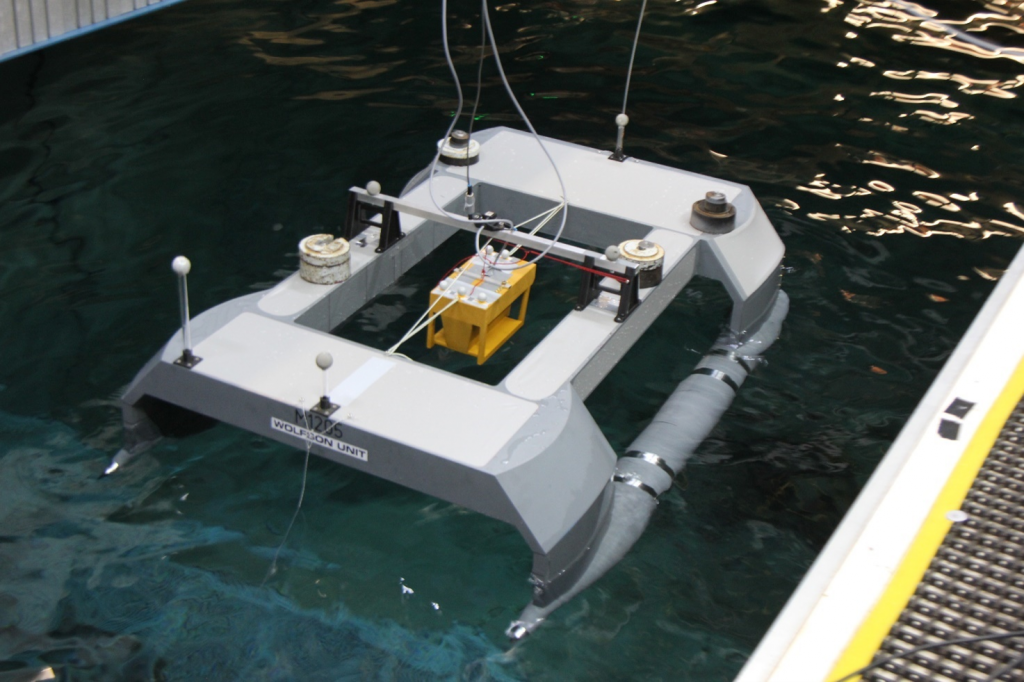
Accelerations were measured on the vessel with traditional accelerometers. The motions of the main hull and the ROV were measured using a Qualisys Motion Capture system – similar to the ones used by large movie studios to track the motions of actors.
This motion capture allows us to generate non-dimensional transfer functions for pitch and heave. These can be used by ACUA to understand what the motion and accelerations of the vessel might be given a particular sea state. Therefore, onboard equipment can be selected to operate in these conditions or operational windows can be set to ensure that the vessel can operate safely.